
In deze pagina geven we een beeld van de digitalisering van de Alt-Wutachtal modelbaan. Achtereenvolgens komen de architectuur, aansturing van de treinenloop, blokken bezet melden, wissels, seinen, beweegbare objecten, keerlussen en voeding aan de orde.
Architectuur
De digitalisering van de modelbaan is opgebouwd langs onderstaande architectuur.
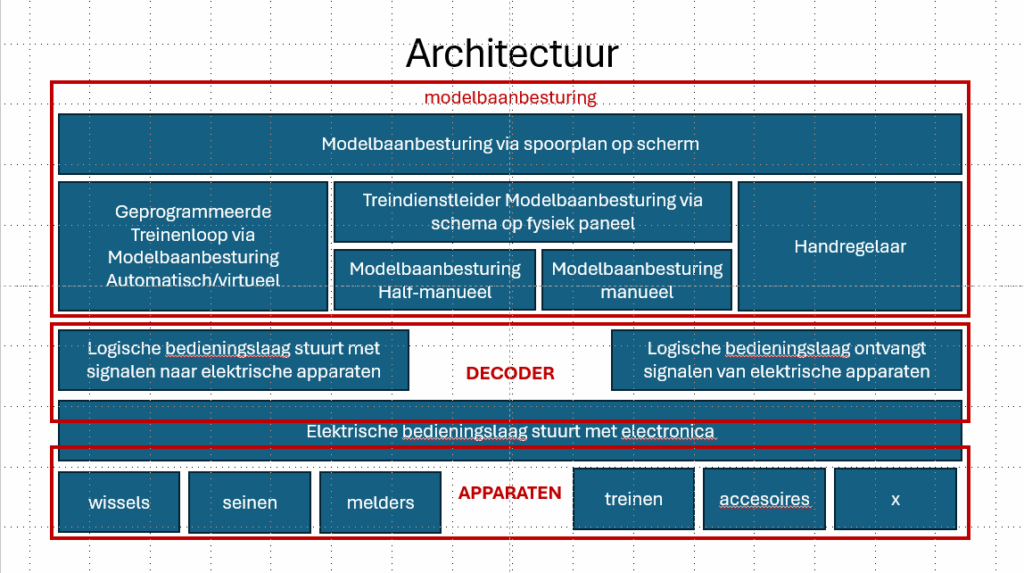
In de architectuurplaat is de laagsgewijze opbouw te zien die gevolgd is. Dit maakt het mogelijk verschillende apparatuur en programmatuur te gebruiken en deze toch tot één geheel te kunnen samen bouwen. De modelbaanbesturing wordt via het open-source programma RocRail gedaan. Daarin is gelijktijdig automatisch, half automatisch en handmatige besturing mogelijk. Bediening kan naar keuze plaatsvinden via een handregelaar, een fysiek bedieningspaneel of het bedieningsscherm van de RocRail-app. RocRail maakt ook besturing via een tablet of telefoon mogelijk en integreert ook andere app’s zoals de Z21. RocRail server communiceert met deze bedieningsapparaten en stuurt vervolgens berichten naar de DCC-Centrale die de berichten (al dan niet via DCC-Boosters) op de DCC ringleiding zet.
Aan de DCC ringleiding hangen DCC-decoders die ‘luisteren’ naar DCC-berichten die voor hun DCC-adres bedoeld zijn en vertalen die berichten naar elektrische signalen naar de aangesloten apparaten. Apparaten zijn er in vele soorten en maten. denk aan treinen die op het spoor staan dat met DCC gevoed wordt, maar ook seinen, wissels, melders en accessoires.
Aansturen van de treinenloop
Het aansturen van de treinenloop vindt plaats op basis van het DCC-systeem (DCC-Centrale YaMorc YD7001). Daarin worden digitale signalen toegevoegd aan een permanente 18V rijdspanning. Met een digitale centrale worden deze DCC-stuursignalen verstuurd en tegelijk de retoursignalen van meerdere sensoren via bussystemen zoals S88 en Loconet ontvangen. Met het treinbesturingsprogramma Rocrail zal de treinenloop worden ‘geprogrammeerd’ op het sporenplan. Dat sporenplan is afgebeeld op een soort digitaal blindschema waar alle wissels, sporen en start/stop-plekken (stations e.d.) zichtbaar zijn. De bediening kan variëren van geheel automatisch geprogrammeerd via treinpaden (rijwegen), tot handmatige bediening van alle wissels, seinen en treinen en hybride vormen van aansturen. In dat geval is er sprake van een geautomatiseerde treinenloop waarbij één of meerdere treinen handmatig worden bediend en het treinpad/rijweg van deze treinen ook kan worden beïnvloed. Hierover is meer te lezen op de pagina treinenloop en de pagina bedieningspaneel.
Bezetmelders (sensoren)
De blokken in de modelbaan, of eigenlijk de toegang tot de wisselstraten, worden hier beveiligd door het spanningsverschil dat ontstaat wanneer er een stroomverbruiker op het spoor zich bevindt, om te zetten in een S88-signaal naar de digitale centrale te leiden. Daar kan op basis van de bekende bezetting van de blokken/treinpaden vastgesteld worden of er actie nodig is om de desbetreffende stroomverbruiker (locomotief, treinstel of stroom-afnemende wagons) te laten “stoppen” omdat het gekozen treinpad verderop niet vrij is.
Een modelbaan zoals de Alt-Wutachtalbahn 2020-2024 vraagt best om veel van dergelijke melders wat zichtbaar is in onderstaande tekening voor het ‘asset management’ (beheer en onderhoud) van de modelbaan. Er wordt gebruik gemaakt van zowel oude LDT-S88 modules als nieuwe TAMS-S88N-5 modules.


Aansturen van de wissels
De wissels (wisselmotoren 16VA AC) worden aangestuurd via LDT-modules die hun DCC-signalen via een sterleiding naar de modules ontvangen. De voeding van de wisselmotoren (16VA AC) verloopt eveneens via een aparte sterleiding.

Aansturing van de seinen
De aansturing van de seinen (vleugelseinen en rangeerseinen) zal gaan verlopen via Arduino-modules. Meer daarover later.
Keerlussen
De keerlussen in de Alt-Wutach-tal-bahn worden bestuurd (d.w.z. de voeding wordt automatisch na detectie van kortsluiting omgewisseld) via twee soorten detectiemodules. Enerzijds is de LK200 in gebruik en op het schaduwstation wordt gebruik gemaakt een TAMS KSM-4 module. Deze heeft ook een ingebouwde wisselbediening.
Aansturing van beweegbare objecten
De aansturing van diverse beweegbare objecten in de modelbaan wordt verzorgd met servo’s die op hun beurt worden aangestuurd door Arduino-modules. Er zijn Arduino modules voor de volgende beweegbare objecten gerealiseerd voor:
Over deze beweegbare objecten en hun aansturing volgen aparte pagina’s resp. berichten. Hierover is meer te lezen op de pagina bedieningspaneel en specifiek Bedieningspaneel BW Fützen en haar subpagina’s
Voeding van de modules
Al deze digitale aansturing vraagt om voeding van netwerken met respectievelijk 18VDCC, 16VAC, 5VDC en soms ook 12VDC. Daarvoor zijn meerdere afgezekerde voedingsnetwerken in de vorm van sternetwerken gemaakt. Het afzekeren per module geschiedt op 3A autozekeringen en hoofdzekeringen voor de distributiepunten.